|
|
|
||||||||||||||||
|
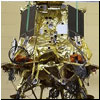
The Luna-Glob lander fails to explore Special section by Anatoly Zak; Editor: Alain Chabot Luna-Glob (a.k.a. Luna-25) was the first robotic mission developed in post-Soviet Russia for the exploration of the Moon. Aiming to land in the high-latitudes of the Southern Hemisphere of our natural satellite, it was intended to pave the way to a whole series of robotic and, eventually, piloted lunar expeditions.
Luna-Glob (Luna-25) mission at a glance:
|
 |
||||||||||||||||
| LUNA-GLOB DEVELOPMENT HISTORY | |||||||||||||||||
 |
1990s: Origin of the Luna-Glob project After the USSR launched its final space probes to the Moon in the mid-1970s, the robotic lunar exploration program fell in priority below Mars-bound missions. Only after the fall of the Soviet Union in 1991, did another lunar mission get an approval for the initial development. It was dubbed Luna-Glob. |
||||||||||||||||
 |
Original scenario of the Luna-Glob mission By 1998, NPO Lavochkin evaluated two possible variations of the Luna-Glob spacecraft, which could be launched by the existing Molniya rocket or by the prospective Soyuz-Fregat system. The ambitious project included a cruise module, a cassette with pencil-shape penetrator probes and a 250-kilogram polar lander. However the project did not go far, primarily due to lack of funding. |
||||||||||||||||
 |
Mid-2000s: First attempt to revive Luna-Glob project Efforts to revive the Luna-Glob project started at the end of 1999, or almost two years after the financial crisis in Russia had stalled the program. At the time, the ever-increasing complexity of the flagship mission to Phobos gave scientists a reason to advocate a pathfinder test flight which could try new hardware and technologies needed for a flight to Phobos. |
||||||||||||||||
 |
Late 2000s: Attempt at cooperation with India From around 2007, the Russian and Indian space agencies discussed a joint lunar mission, which became known as Luna-Resurs. According to a primary scenario, Luna-Resurs was expected to follow Luna-Glob and, possibly, use its Moon-orbiting component as a relay station for communications with ground control. |
||||||||||||||||
 |
2011: Luna-Glob becomes exclusively lander mission
On Nov. 17, 2011, the Space Council within the Russian Academy of Sciences, RAN, officially decided that Luna-Glob and Luna-Resurs missions had to be split into separate landing and orbiting missions. However, despite common sense dictating launching of the orbiter ahead of the lander, Russian planners put the landing mission first. |
||||||||||||||||
 |
2012: Reassessing the Russian lunar exploration program Following the Phobos-Grunt fiasco in November 2011, a new Russian plan for unmanned lunar exploration emerged at the beginning of 2012. Although launch dates of the upcoming missions had to be delayed in order to learn the lessons of Phobos-Grunt, the unmanned lunar exploration program finally received the priority among planetary missions. |
||||||||||||||||
 |
2013: Learning the lessons of Phobos-Grunt More than a year after the Phobos-Grunt failure, Russian engineers still had much work to do to prevent history repeating itself with the upcoming robotic moon landing. According to multiple industry sources, work on the Moon-bound Luna-Glob landers also suffered from the faulty technological legacy that doomed Phobos-Grunt. |
||||||||||||||||
 |
2014: Russian Moon missions face three-year delay In 2014, an updated schedule of the Russian robotic planetary program revealed multi-year delays for the Luna-Glob lander, Luna-Glob orbiter and Luna-Resurs lander missions. The launch of the first mission in the trio was pushed back from 2016 to 2019. |
||||||||||||||||
 |
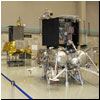
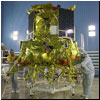
2015: Luna-Glob faces new delays Between 2014 and 2015, the long-delayed Luna-Glob lander started appearing in metal, however its launch had to be postponed again from the end of 2017 to the end of 2018 and even that schedule was already looking as highly unrealistic. |
||||||||||||||||
 |
2016: Paper phase completed, design updated In 2016, the Luna-Glob project got a new revision of its formal Technical Assignment, which authorized its work, based on latest changes in the project and opening opportunities for cooperation with the European Space Agency, ESA. |
||||||||||||||||
 |
In 2017, Luna-Glob continued crawling through the development process, transitioning from blueprints and mockups to flight-worthy components. But limited resources and other priorities kept the launch date for the Luna-Glob clouded in uncertainty. |
||||||||||||||||
 |
2018: Luna-Glob gets landing site but suffers new setbacks (INSIDER CONTENT) In 2018, the Luna-Glob spacecraft had been officially assigned its landing location on the Moon, but the long-delayed mission was hit with a new significant launch delay, while the lander lost another science instrument. |
||||||||||||||||
 |
2020: Luna-Glob works against expectations (INSIDER CONTENT) After years of broken promises, the Luna-Glob project made the most optimistic headlines in 2020, but behind-the-scene reports put the loudly advertised October 2021 launch date for the mission in serious doubt despite some visible progress. |
||||||||||||||||
 |
2021: Luna-Glob faces uphill battle (INSIDER CONTENT)
In the first half of 2021, a continuous stream of official announcements kept promising the imminent launch of Luna-Glob October, and as usual, experts warned about the lack of time to adequately prepare the mission before the end of the year. Indeed, in the second half of 2021, a delay to May 2022 was confirmed. |
||||||||||||||||
 |
2022: Luna-Glob will not fly as promised (INSIDER CONTENT)
Active preparations for the launch of Luna-Glob continued in 2022, but there was practically no chance for the mission to launch in the middle of this year as advertised by Roskosmos. |
||||||||||||||||
 |
2023: Luna-Glob project is in a tight race to launch (INSIDER CONTENT) In 2023, Russian engineers working on the preparation of the Luna-Glob spacecraft had only two days in July and August to launch their first mission to the Moon since 1976. |
||||||||||||||||
 |
Nearly half a century after the last Soviet probe visited the Moon, a new-generation lunar lander launched from the Russian Far East on Aug. 11, 2023, with a destination in the southern polar region of the Earth's natural satellite. |
||||||||||||||||
| LUNA-GLOB (LUNA-25) SPACECRAFT | |||||||||||||||||
SUPPORT THIS PROJECT! |
|||||||||||||||||
 |
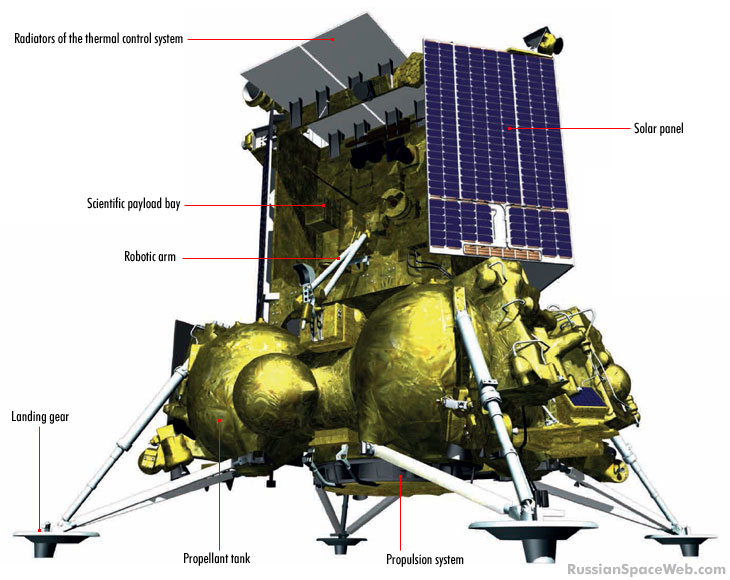
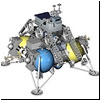
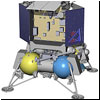
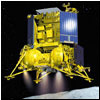
Design of the Luna-Glob spacecraft (INSIDER CONTENT) The Luna-Glob lander was developed at NPO Lavochkin as a scaled down version of the Soviet-era E8 platform that was a delivery vehicle for the famous Lunokhod (rover) and Lunocherpalka (sample-return spacecraft) in the 1970s. |
||||||||||||||||
 |
Flight control system of the Luna-Glob spacecraft (INSIDER CONTENT) After the loss of the Phobos-Grunt probe in 2011, due to a compromised flight control system, NPO Lavochkin decided to build a whole new computer system to control its next deep-space project – Luna-Glob. The development of the Luna-Glob's flight control system, BKU, became the most challenging part of the whole project. |
||||||||||||||||
 |
Propulsion system of the Luna-Glob lander (INSIDER CONTENT) The Luna-Glob lander is equipped with 15 engines of four different types to perform the complex trip to the Moon and the extremely risky descent to the lunar surface. |
||||||||||||||||
 |
Thermal control system of the Luna-Glob lander (INSIDER CONTENT) During its flight to the Moon and operation on the lunar surface, the spacecraft will experience a whole range of temperature extremes from the searing heat of the Sun and reflected radiation of the Moon to a complete darkness and cold during the lunar night. It will make the operation of the thermal control system especially critical for the at least one-year-long survival expected from the Luna-Glob lander. |
||||||||||||||||
 |
Prototypes of the Luna-Glob hardware (INSIDER CONTENT) The Luna-Glob project left numerous prototypes and components on the ground, which were used for various tests during the development of the spacecraft. None of these vehicles or their combination could provide a "ready-to-go" solution for an immediate re-fly of the mission, but with political will and adequate funding, they could potentially facilitate the construction of a new lunar lander in the foreseeable future. |
||||||||||||||||
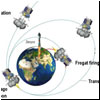 |
Flight scenario of the Luna-Glob mission (INSIDER CONTENT) The Luna-Glob mission will begin with the liftoff of a medium-lift Soyuz rocket. It is a major departure from the most advanced Soviet lunar probes which relied on a more powerful Proton rocket. At the same time, Luna-Glob will target a harder-to-reach southern polar region of the Moon for the first time instead of the easier-to-reach landing sites in near-equatorial latitudes. |
||||||||||||||||
 |
Landing scenario for the Luna-Glob project Attempted by Russia for the first time since 1976, a touchdown onto the lunar surface will be one of the riskiest aspects of the Luna-Glob mission. The landing will be staged from the low orbit around the Moon. |
||||||||||||||||
| SCIENCE ABOARD LUNA-GLOB | |||||||||||||||||
 |
Luna-Glob seeks pioneering science (INSIDER CONTENT) The Luna-Glob mission was intended for a wide range of scientific investigations on the surface of the Moon, as well as for testing technologies and acquiring engineering experience for future lunar exploration. It was developed with the ambition to be the world's first lander operating in the polar regions of the Moon. |
||||||||||||||||
 |
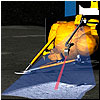
LMK robotic arm (INSIDER CONTENT) Luna-Glob will be the first Russian lunar lander equipped with a multi-purpose remotely controlled robotic manipulator. It will be used to collect soil samples, guide TV cameras to their targets and probe the lunar surface. |
||||||||||||||||
 |
STS-L cameras: Luna-Glob to feature multiple "eyes" (INSIDER CONTENT) The Luna-Glob spacecraft was equipped with a set of eight miniature TV cameras, known as STS-L, designed to obtain images of the Moon during the descent to the surface and image the operation of the lander's robotic arm on the surface. |
||||||||||||||||
 |
Luna-Glob to probe its landing site in infrared (INSIDER CONTENT) In case of a successful soft-landing on the surface of the Moon, the Luna-Glob lander will deploy a cluster of movable cameras to search its surrounding area for chemicals hinting the presence of water. |
||||||||||||||||
 |
Luna-Glob to probe lunar soil with neutron detector (INSIDER CONTENT) The ADRON-LR experiment aboard the Luna-Glob (Luna-25) lander heading to the surface of the Moon will use nuclear physics methods to detect water just below the lunar surface. |
||||||||||||||||
 |
LAZMA-LR instrument (INSIDER CONTENT) The LAZMA-LR instrument aboard the Luna-Glob (Luna-25) lander will evaporate small samples of lunar regolith to perform a very precise element and isotope analysis of the material making up the lunar surface. |
||||||||||||||||
 |
Luna-Glob to witness solar wind hitting lunar surface (INSIDER CONTENT) The 2.5-kilogram ARIES-L instrument will study at close range the bombardment of the lunar soil with photon particles by the solar wind and the resulting emission of neutral atoms. |
||||||||||||||||