. |
The Mars-96 mission In November 1996, Russia made its first post-Soviet attempt to launch a deep-space mission. Known as Mars-96, this complex spacecraft failed to escape the Earth orbit on its way to the Red Planet due to the rocket failure. The loss of this major international mission to Mars marked the beginning of a long hiatus in the Russian planetary exploration program.
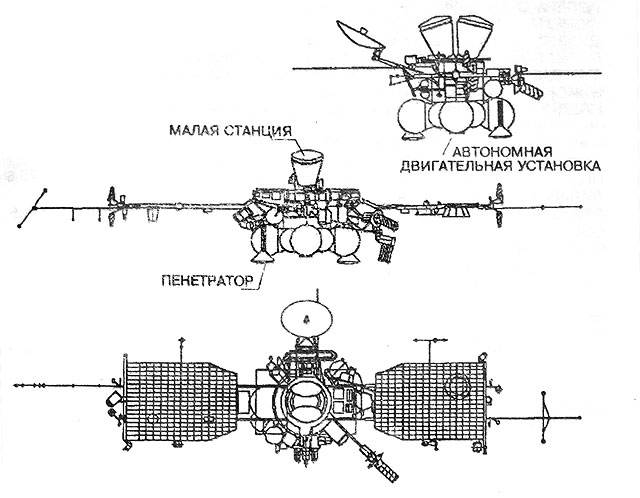
Origin of the program What would become known as the Mars-96 mission, actually started as Mars-92 and then Mars-94 project. Originally, Mars-94 was to include a pair of spacecraft internally designated M1. One of then was to carry a Mars rover and another -- an orbiter. As the project slipped to 1994, due to financial problems, only the orbiter survived the cut, while the rover was first pushed back to 1996. However then the orbiter had to be delayed to 1996, prompting a delay of the rover to 1998 and later leading to its cancellation. (479) In 1980, NPO Lavochkin completed a preliminary design of the Phobos mission (1F and 2F), which was conceived as the first step in a new Soviet effort to explore Mars, culminating with the return of soil samples from the Red Planet. To plan ahead, NPO Lavochkin started a series of studies (NIRs) in the first half of the 1980s. The Zarya-MOM (Dawn) project evaluated a standardized spacecraft platform, which would use the atmospheres of Mars and Venus as a braking medium to slow down and enter orbits around the respective planets. In parallel, the Sigma project considered as many as 10 different scenarios for delivering soil samples from Mars, eventually favoring a two-spacecraft mission involving a docking in the orbit of Mars. First, the 8MP spacecraft would land on Mars with a rover which would gather samples and deliver them to the return rocket. After its launch from the surface, the return rocket would link up and transfer samples to the 8MS spacecraft in the Martian orbit, which, in turn, would return them to Earth. These two projects, especially Sigma, created the foundation for the architecture of future missions to Mars, which became the focus of the Soviet unmanned planetary exploration program during the 1980s. With Decree No. 274 of the Military Industrial Commission, issued on Aug. 1, 1983, NPO Lavochkin started the development of a space exploration program extending from 1986 till the end of the 20th century. According to the plan formulated in 1984, the original Phobos mission would be followed in 1994 by a spacecraft tasked to deliver soil samples from Phobos. Then, (in 1996 (?)), a pair of 6M spacecraft would enter a 500-kilometer orbit around Mars and send from 6 to 12 penetrating probes onto its surface. In 1999, a pair of 7M vehicles would deliver 850-kilogram rovers onto the Red Planet. After 2000, the 8MP and 8MS spacecraft would head to Mars to return soil samples. Mars-92 proposal (M1 project) In May 1987, NPO Lavochkin issued "Basic principles for the development of technical proposals on the MS-92 complex," which also had the manufacturing index M1. According to the document, a pair of spacecraft would lift off in 1992 with the goal of entering an elliptical orbit around Mars with an orbiting period of seven hours. Each spacecraft was expected to carry a lander with a 240-kilogram rover, a 120-kilogram balloon to hover in the atmosphere of Mars and a 55-kilogram soil-penetrating probe. The main spacecraft would be based on the Phobos platform, while all the other components would be developed from scratch. By December, a technical proposal for the M1 project was ready, however its planned launch date had to be pushed to 1994 and the penetrating probe dropped from the mission. Russia's traditional partner in planetary missions -- France -- took upon itself to develop a giant sausage-shaped balloon with a total volume of 6,000 cubic meters. It would carry some instruments in an aerial gondola, as well as drag others on a rope along the surface for contact studies. In a year, the preliminary design of the Mars-94 project had been completed, with the rover gaining weight and reaching 350 kilograms, the balloon - 200 kilograms, including a 48-kilogram instrument gondola. Scaling down Mars-94 On Dec. 30, 1988, the Central Committee of the Communist Party and the Council of Ministers of USSR issued a decree entitled "On development of an artificial satellite of Mars with the delivery of a landing vehicle on its surface." It would become the last Soviet-era government document on the subject. With the Soviet economy facing increasing problems, the government had no choice but to start trimming its space budget. As a result, the September 1989 revision of the preliminary design no longer contained a rover. (According to another interpretation, the rover mission was bumped to a next window as early as 1998.) It still included a balloon with a 57.5-kilogram gondola, 20-kilograms landers for meteorological studies and a 60-kilogram penetrator. In the spirit of Gorbachev's glasnost, the project was not officially classified. There were still hopes to launch the M2 Mars rover mission in 1996 and the M3 soil-sample return mission in 1998, however these projects had never reached the full-scale development stage. Post-Soviet science program, delay to 1996 With the collapse of the Soviet Union in 1991, Mars-94 project lost its twin vehicle, leaving a single flight version of the spacecraft on the budget. France had also withdrawn from the project, due to overspending on its part of the project. Still, scientists from 21 countries participated in the Mars-96 project, contributing instruments and experiments, including two experiments from NASA. Mars-94 (M1) now aimed to deliver two small landers, MS, and two penetrators to the surface of Mars following its launch in October 1994. However financial problems in the post-Soviet Russia were continuously delaying the production of flight hardware, for example the Argus platform, which was critical for the independent pointing of science instruments toward their targets. In the end, the M1 program had to be delayed for two years to a less favorable window for launches to Mars in 1996. The follow-on M2 project, intended to carry a rover, had to move as well -- to 1998. (533) According to one source, a six-wheel rover for the mission was expected to have a mass of 35 kilograms and carry 15 kilograms of science instruments. Mission planners considered dropping the development of the Argus platform altogether and installing its scientific payloads directly onto the spacecraft, accepting all resulting limitations. However, in the end, Germany, the supplier of a TV complex for Argus, funded the development of the platform. Spacecraft description Upgrades to 1F to make M1 The design of the Mars-96 spacecraft was based on the same platform (1F), which had been used in the 1980s for the Phobos mission. However it was upgraded to take into account problems encountered in the Phobos missions. The production process for the infamous K52 condensers of secondary power sources, which doomed the Phobos-2 spacecraft, was changed and updated devices were certified for flight. The ground control procedures and software were also changed to exclude a repetition of the programming error, which led to the loss of Phobos-1. New procedures and radio-control hardware were tested onboard the Interball spacecraft, which after its launch in August 1995 logged a successful year in orbit by the time of the Mars-96 launch. (531) The orbiter was equipped with the Argus platform to precisely point three instruments toward their targets along three axis, without the need to move the spacecraft. The two-axis Pais platform also carried three instruments. The spacecraft also carried a medium-gain antenna to communicate with the small landers and a low-gain antenna for communications with the Earth. Mars-96 would be equipped with a three-axis attitude control system, capable of using stars and the Sun for its orientation in space. Mission scenario The new mission schedule called for the launch of the spacecraft on November 16, 1996. After a 10-month journey, Mars-96 would enter the orbit of Mars on Sept. 12, 1997, to start at least a year-long mission. At the time, Mars-96 was expected to be the largest research vehicle designed to travel across the Solar System. In fact, the Block D upper stage would not have enough power to send the spacecraft from its initial parking orbit on its escape trajectory toward Mars after launch from Baikonur onboard a Proton rocket. The upper stage would accelerate the spacecraft by 3,150 meters per second and the probe would then use its Autonomous Propulsion Unit, ADU, to add another 575 meters per second. Two corrections on the way to Mars would add another 35 meters per second. Small landers operations Some four or five days before entering orbit of Mars, small landers, MS, would be released from the Orbital Vehicle, OA, with a speed of 10 meters per second. The orbital vehicle would then conduct a separation maneuver with a speed of 35 meters per second. The two landers would hit the atmosphere of Mars with a speed of 5.75 kilometers per second, at an angle of 10.5 and 20.5 degrees toward the local horizon. (533) Initial braking would be provided by the aeroshell, then by a parachute. Shortly, before impacting the surface, a pair of airbags would be inflated around each lander to soften the impact. The spacecraft would bounce as high as 70 meters into the thin air before they would finally come to rest. Lines holding the two bags would then be cut and the lander would free fall one meter to the ground. This landing method was first successfully tested on the Moon during the Luna missions in the 1960s. A NASA Mars Pathfinder rover, which was slated to fly to Mars in the same launch window of 1996, also used inflatable bags to complete its soft landing. The two landers were expected to touch down in the Northern hemisphere of Mars from the 10th to the 45th-degree latitude, separated by 5-10 degrees in latitude. The target geographic location was later identified as Amazonis Planitia. (533) Each lander would have to survive from one to four weeks on the surface, before it would get its first opportunity to establish a contact with the orbiter. Orbiter operations In the meantime, as the Mars-96 orbiter would make its closest approach to Mars within some 300 kilometers over 26 North latitude, its ADU engine would fire to slow it down by 1,020 meters per second in order to enter orbit around Mars with an inclination 106.4 degrees toward the Martian equator. The spacecraft would spend 43.1 hours to complete a single revolution around the planet approaching as close as 300 kilometers toward its surface. The ADU propulsion unit would then be dropped, with the spacecraft relying on its own low-thrust engines to conduct six orbit corrections during its year-long mission. Penetrator operations After spending from one to four weeks in the orbit of Mars and making several orbit corrections, the orbiting vehicle would release another pair of probes toward Mars. Unlike their soft-landing companions, these needle-shaped vehicles were designed to strike the surface of the planet at much higher speed and penetrate 4-6 meters into the soil. Following a very careful separation from the orbiter, the penetrators would use their own solid-propellant engines, which would deliver around 23 meters per second of braking velocity, to send them into the atmosphere of Mars. After additional braking in the Martian atmosphere with the help of an inflatable shield, the penetrators were expected to strike the surface of Mars with a speed of around 60-80 meters per second in the Northern hemisphere, along the 37th latitude. According to plans published shortly before the launch of the Mars-96 mission, the goal was to land one of the penetrators not far from small landers and another -- at least a quarter of hemisphere away. However, should orbital corrections take longer than expected or gathering dust storms over the planet threaten the mission, both penetrators could be dispatched during a single communication session with mission control. (533) Last preparations for launch Despite the horrendous economic situation surrounding them, workers and engineers involved in the Mars-96 project made a seemingly impossible effort to prepare the spacecraft for launch, often working without pay and seeing many of their colleagues leave the industry. There were proposals to delay the mission to 1998, however mission officials had good reasons to fear the complete cancellation of the project by that time, due to the worsening financial situation in the country and a previous decision to scale-down all future planetary probes to fit into the Soyuz rockets, rather than Proton. In the end, all critical tests on the spacecraft had been completed by the planned launch date in November 1996. The preparation of Russian scientific payloads for the spacecraft suffered from the most serious financial problems and the resulting lack of coordination with different aspects of the mission. Some deficiencies were reported on the Argus autonomous platform, which was designed to guide TV cameras toward their targets without the need to move the spacecraft itself. There were also some problems with the preparation of the small landers and penetrators, whose processing had to be outsourced to newly created private entities. (531) At the last minute, the Argus platform and landers were delivered directly to Baikonur for final integration with the spacecraft, skipping electric tests of the fully integrated vehicle, which had to be conducted at the manufacturer. By the launch time, the software and flight program for the control of both platforms with scientific instruments and for guiding a medium-gain antenna for communications with the landers was not ready. Mission engineers still held hope to write the necessary code for science payloads during the following year, while the spacecraft was en route to Mars. During final assembly in Baikonur, personnel discovered that the spacecraft did not fit into the payload fairing of the launch vehicle. As it transpired, the small landers were actually larger than their official specifications and prevented the complete folding of a boom holding the high-gain antenna. To resolve the problem, specialists cut a 30-centimeter segment from the structure. The launch window for Mars-96 mission opened on November 12, however mission planners scheduled the liftoff on November 16 at 23:03 Moscow Time (20:03 GMT), when the rocket could deliver maximum performance on the way to Mars. (533) Launch failure The Proton rocket (8K82K, Proton-K) carrying the Mars-96 spacecraft lifted off from Baikonur Cosmodrome on Nov. 16, 1996, at 23:48:52.75 Moscow Time (20:48:53 GMT). Its three booster stages and the first burn of the Block D2 (11S824F) upper stage went as scheduled, delivering the spacecraft to an initial orbit at an altitude of around 160 kilometers and prompting many observers and participants of the project at mission control to start celebrating a successful launch. The second firing of the Block D was scheduled to take place one hour, eight minutes and 52 seconds after liftoff and beyond the range of Russian ground control stations. The maneuver would deliver 3,150 meters per second in acceleration, followed by the firing of the ADU propulsion unit onboard Mars-96 to escape the Earth orbit and start a path to Mars. However, Block D misfired, apparently delivering 20 meters per second in the wrong direction. The spacecraft then separated from the upper stage at the beginning of the 2nd orbit. Its solar panels and other external elements had deployed and the ADU propulsion unit fired, in an effort to make up the necessary 3,700 meters per second, which was now impossible. Instead, due to the wrong orientation, the maneuver actually pushed the perigee of the spacecraft to as low as 75 kilometers, causing the spacecraft to lose its orbital velocity and sending it toward reentry into the Earth atmosphere after only three revolutions around the Earth. During its 2nd orbit, from 22:19:14 to 22:26:55, Mars-96 passed within the range of the ground station in Yevpatoriya in the Crimean Peninsula. From 22:55 to 22:57, Mars-96 also flew over the Ussuriisk ground station. Both stations received identifiable signals from the spacecraft. The Block D was then found in a 145.7 by 171.1-kilometer orbit. From its 2nd to 5th orbit, Block-D was transmitting telemetry, but then it left the range of Russian ground control stations and its batteries were depleted by the evening of November 17. As a result, communications were never restored with the stage. According to various reports the Mars-96 spacecraft burned up over the Southern hemisphere with surviving debris reaching the Earth surface somewhere between Easter Island and the coast of Chile at 04:32 Moscow Time (01:32 GMT) on Nov. 17, 1996. The Block D2 upper stage reentered the atmosphere on November 18, at around 01:20 GMT after a 28-hour flight. Its remnants impacted in the Southern Pacific around 50.9 degrees South latitude and 168.1 degrees West longitude. The stage was confused with the spacecraft and since the latter carried radioactive power sources and the reentry path took Block D near Australian territory, there were concerns about possible radioactive danger. As a result of the withdrawal of the Soviet-era command and control ships from the Southern hemisphere due to lack of funding, no telemetry could be received during the time of the scheduled second engine burn, leaving the exact cause of the failure unknown. Aftermath Despite the problems with the scientific payloads, sources involved in the Mars-96 project believe that had the launch vehicle performed as planned, the spacecraft was adequately tested and prepared to make it in operational condition to the orbit of Mars. That could not be said about its critical payloads, such as landers, or about the next Russian planetary mission - Phobos-Grunt.
Known specifications of Mars-96:
Small lander, MS
Penetrators The titanium-made penetrators were designed to study the atmosphere, surface and the sub-surface of Mars. They carried a total of 10 science instruments, flight control system, radio-transmission system and nuclear power and heat generator. The payload of the penetrators included a meteorological complex, TV camera, gamma-spectrometer, magnetometer, X-ray spectrometer, Alpha-spectrometer, thermal probe, seismometer, accelerometer, and inclinometer. The penetrators were designed to function up to one year at a depth of 4-6 meters below the surface. Their performance was validated during drop tests inside a 60-meter tower at Moscow Aviation Institute. (532)
Both, small landers and penetrators would use miniature plutonium-238-fed heat generators, BO (blok obogreva), with a total power of 35 Watts. The Angel thermoelectric generator, RTG, was also carried on the mission.
Mars-96 science instruments
Chronology of the Mars-96 project 1996 Oct. 15: Mars-96 spacecraft arrives at Baikonur. Oct. 18: Pre-launch processing of the spacecraft starts. Oct. 23: Completion of tests of the Argus pointing platform and beginning of propellant loading onboard the spacecraft. Nov. 1: Small landers and penetrators are delivered to Baikonur. Nov. 5: The completion of payload tests and the installation of the thermal blankets on the spacecraft. Nov. 7: Small landers and penetrators are integrated with the spacecraft. Nov. 8: Payload fairing is installed onto the spacecraft. Nov. 11: Integration of the payload section with the Proton launch vehicle. Nov. 12: The Proton launch vehicle with the Mars-96 spacecraft is rolled out to the launch pad.
|
|