|
Luna-Resurs (Luna-27) lander In the 2010s, the Luna-Resurs project was reconfigured for cooperation with the European Space Agency, ESA, instead of India. Then the escalation of Moscow's invasion of Ukraine in 2022, left Luna-Resurs without international partners.
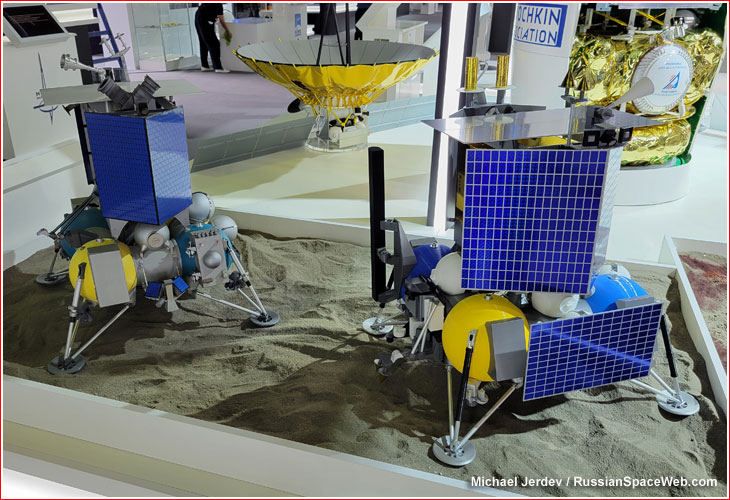
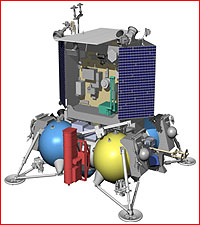
A scale model of the Luna-Resurs lander (right) next to the Luna-Glob lander. Early development Following the Phobos-Grunt launch fiasco in 2011, all planetary exploration and science projects in Russia faced an uncertain future. The Luna-Resurs and Luna Glob missions were now not expected before 2016 or 2017. According to unofficial sources, both projects were reverted back to the experimental phase, forcing another major redesign of the missions. In the meantime, in April 2012, the Indian Space Agency announced that Luna-Resurs would not fly until its GSLV rocket logged two successful missions beginning in September-October 2012. The landing component of the former Luna-Glob mission was rescheduled to fly in 2017 under the name Luna-Resurs. It was expected to have a larger payload capacity than Luna-Glob-1, sport an improved landing gear and carry more propellant and a larger array of scientific instruments than its predecessor in 2015. The 2,200-kilogram spacecraft could still deliver a small Indian-built rover (with a mass of around 15 kilograms) to the surface as a part of the 200-kilogram scientific payload. However after the loss of Phobos-Grunt and the postponement of the lunar plans, India essentially suspended its participation in the program. As a result, by the end of 2013, NPO Lavochkin considered the possibility of replacing the Indian rover with a relatively simple moving vehicle, possibly developed by students at the Bauman MGTU, a leading school preparing cadre for the Russian rocket and space industry. The rover could have the task of imaging and delivery of soil samples during the mission. Luna-Resurs could also carry a European-built optical navigation and a hazard-avoidance system. The lander was expected to operate on the surface for at least a year. The most important part of the scientific gear on the Luna-Resurs would be a state-of-the-art surface drill capable of penetrating the lunar regolith up to a depth of two meters in a quest for lunar ice. To include a European-built drill adapted from the ExoMars-2018 mission, the Ministerial Council of the European Space Agency, ESA, was initially expected to approve the continent's participation in the Luna-Resurs project during its meeting in the fall of 2014. However by October 2013, the launch of the Luna-Resurs mission was postponed from the 2017-2018 period to 2019. In October 2014, the TASS news agency quoted Maksim Martynov, Deputy Designer General at NPO Lavochkin, promising the launch of Luna-Resurs lander in 2019, even though other reports during the same year pushed the possible launch date to 2023. Martynov also confirmed that the probe's high-accuracy landing system and its "cryogenic" drill designed to preserve the thermal conditions of samples, would have to be contributed by Europe. According to Martynov, an inter-agency agreement on the mission between ESA and Roskosmos was undergoing a government review. The drill system and associated laboratory equipment received the official designation of Package for Resource Observation and in-Situ Prospecting in support of Exploration, Commercial exploitation and Transportation, or PROSPECT. Along with the PILOT navigation system, PROSPECT was being developed by ESA’s Directorate of Human and Robotic Exploration. The Italian company Leonardo led the development of the drill system, while the Open University was responsible for the chemical analysis laboratory associated with the instrument. Both systems were submitted to ESA’s Council of European Ministers meeting in December 2016 and were approved for development. On April 13, 2022, ESA announced that it had ended its cooperation with Russia on the Luna-25, Luna-26 and Luna-27 missions as a response to the Russian aggression in Ukraine. As a result, ESA arranged for the flight of the PROSPECT drill on the NASA-led Commercial Lunar Payload Services, CLIPS, mission. Searching for water with Luna-Resurs Even with the best locations, success in pinpointing lunar water was not guaranteed. The resolution of the LEND is around 5-10 kilometers and the distribution of the ice could resemble Swiss cheese, with many holes probably invisible to the sensor, Basilevsky explained. “Luna-Resurs could still end up in a “hole,” but we hope it will not.” Upon its successful landing, Luna-Resurs would release a 15-kilogram Indian rover. Even though its role is mostly political, the small machine was expected to carry up to two kilograms of scientific gear. It could be used to collect soil samples as far as dozens of meters away and carry them back to the lander for analysis by onboard instruments. Cameras onboard both rover and the lander would constantly monitor the operations of both vehicles. (434) According to the agency, a drill designed to penetrate from one to two meters into the lunar surface was envisaged by ESA to fly to the Moon’s south pole on Russia’s Luna-27 lander. "It is an essential part of a science and exploration package being developed to reach, extract and analyze samples from beneath the surface in the Moon’s south polar region," explains lunar exploration systems engineer Richard Fisackerly. "This region is of great interest to lunar researchers and explorers because the low angle of the Sun over the horizon leads to areas of partial or even complete shadow. These shadowed areas and permanently dark crater floors, where sunlight never reaches, are believed to hide water ice and other frozen volatiles." The drill would first penetrate into the frozen "regolith" and then deliver the samples to a chemical laboratory, which was being developed by the UK's Open University. Prospect was one of the packages being developed by ESA for flight to the Moon as part of cooperation on Russia’s lunar program along with the PILOT landing system. LEIA (LIDAR for Extra-terrestrial-Imaging Applications) Neptec’s LEIA was being developed by a team of engineers at Neptec UK’s offices and laboratory at Harwell Campus in Oxfordshire. LEIA was to be Neptec’s first LIDAR qualified for operation in high Earth orbit. LEIA would feature low mass and volume and a range of 1,500 meters. It was a critical component of ESA’s autonomous landing navigation system and would be integrated with the lander. During descent there would be two re-targeting opportunities during which the LIDAR would direct a pulsed laser beam towards the surface and measure the time of flight of the reflected light. This, along with the scanning system that would compensate for the lander’s motion, would allow 3D mapping of the target landing area, even in the absence of illumination or under changing light conditions. The hazard detection and avoidance software on board would use this data to locate a suitable landing area on the South Pole of the Moon, avoiding uneven terrain and obstacles. When it was safely on the surface the PROSPECT payload would be commissioned and would collect and analyze samples on the lunar surface.
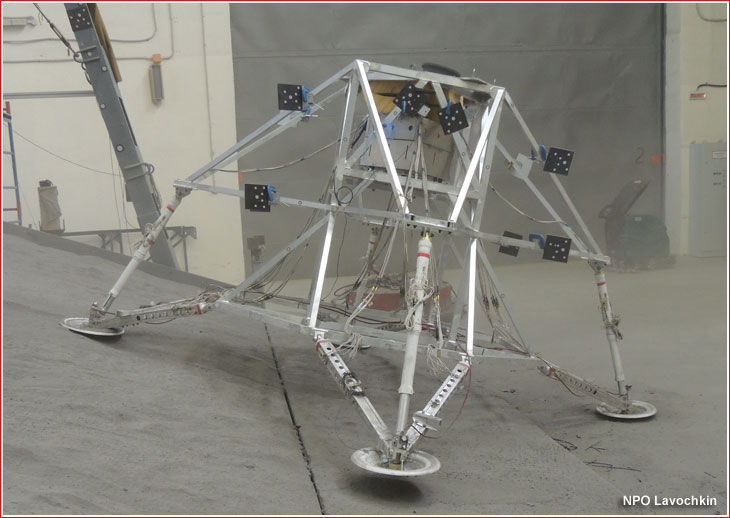
According to official pronouncements made in 2021, the launch of the Luna-27 (Luna-Resurs) mission was scheduled for 2025, however, in September 2022, Igor Mitrofanov, the Head of the Nuclear Planetology Department at the Space Research Institute, IKI, in Moscow admitted that the project would likely need two additional years for the replacement of imported components, due to sanctions imposed by the West after the escalation of the war in Ukraine. In July 2023, Mitrofanov added that work on a Russian drill to replace the European original was in the design documentation development phase and active efforts were under way to replace other foreign components of the mission. At the time, the launch of the Luna-27 lander was officially scheduled for 2028. On June 4, 2025, NPO Lavochkin announced that it had completed development tests of the dynamic prototype of the Luna-27 lander. According to the company, the tests closely simulated landing conditions on the Moon, including lunar gravity and imitation of the surface soil. The testing was conducted at the experimental facility first completed in 2017, but upgraded for the Luna-27 lander during 2024, the company said. Accompanying photos, dated May 15, 2025, showed the skeleton lander sitting on the tilted simulator of the lunar surface after an apparent drop test. This work was to be concluded "in the near future" with the analysis of the data gathered during the test, Lavochkin said. The announcement did not reconfirm the launch date for the Luna-27 mission, but said that the Luna-Resurs-1 project had been included into the Nauka Federal Project then still under development for the period from 2026 to 2035. (INSIDER CONTENT) But within a couple of months, (in August 2025), the Director at IKI, Lev Zeleny said that the launch of Luna-27A would have to postponed from 2028 to 2029, while Luna-27B was pushed back to 2030. The delay was likely related to the corresponding postponement of the preceding Luna-26 orbiter mission.
Science instruments proposed for lunar landing missions in 2015 and 2017, as of 2012 (598):
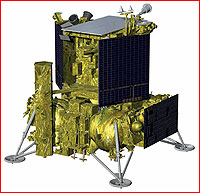
Design of the Luna-Resurs lander as of 2012. At the time, it was expected to reach the Moon in 2017. Credit: Roskosmos
|
|