More on Phobos-Grunt:
Project developments in 2004-2009
Searching for details: The author of this page will appreciate comments, corrections and imagery related to the subject. Please contact Anatoly Zak. Acknowledgments: Author would like to thank Dwayne Day for his help in preparing this section. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
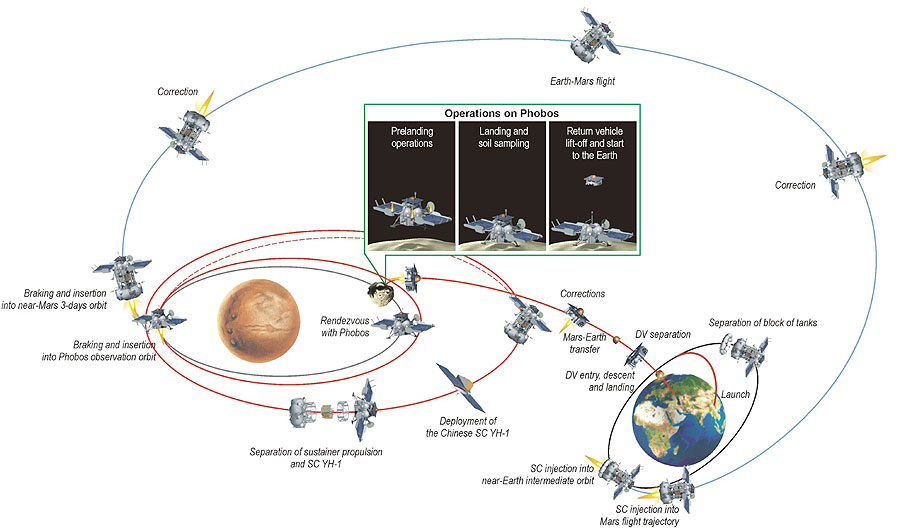
| Above: The mission scenario of the Phobos-Grunt project | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Russia's Phobos-Grunt spacecraft was scheduled to embark at the end of 2011, on a three-year mission aimed to land on the surface of the Martian moon Phobos and return samples of its soil back to Earth. The nation's first launch beyond the Earth orbit since 1996 would face numerous challenges, including a highly accurate rendezvous with a space rock millions of kilometers away from Earth, a careful landing on its rugged surface in near weightlessness and surgical-precision movements of onboard robotic arms to collect and load soil samples into a return vehicle.
The Phobos-Grunt mission would start with the launch on a two-stage Zenit rocket (Zenit-2SB41.1) from Site 45 in Baikonur Cosmodrome, Kazakhstan, at the end of 2011. By the beginning of 2011, the launch window was expected to open on October 26-27 and last for around 20 days. The spacecraft would initially enter a low parking orbit around the Earth, where it would separate from the second stage of the Zenit rocket. The separation would trigger a signal with a triple backup to activate the onboard command sequencer, BVK, launching the flight program and testing all systems. The attitude control system, SOiS, was suppose to stabilize the spacecraft after the separation, followed by the activation of two optical solar sensors, OSD. In no more than 15 minutes the spacecraft was programmed to lock itself onto the Sun with an angular accuracy of 1 degree. To maintain solar orientation, the flight control algorithm was designed simultaneously to process input from both OSD optical sensors and from a BIB inertial gyroscope, thus achieving higher chance for the accurate position of the spacecraft in space by the time it leaves daylight portion of the orbit to enter the Earth's shadow. During this phase of the flight, telemetry could be downlinked via RPT111 transmitter, which could be activated by the request from the ground station and also it was backed up by a PVM timer synchronized with an onboard time system. The same principle controlled the RDM receiver/transmitter. Switch to three-maneuver scenario In anticipation of the engine firing, during the second orbit, the spacecraft would switch to inertial orientation, INO. The spacecraft would use its own propulsion unit, MDU, (whose design was based on the Fregat upper stage) to enter a trajectory toward Mars. An external propellant tank of the MDU propulsion unit will be jettisoned after the initial maneuver in the Earth orbit. The MDU would then fire again, to complete insertion into the interplanetary trajectory. Later, the mission's launch profile was modified to include three MDU firings in the Earth orbit: the first maneuver would push the spacecraft from the initial parking orbit into the first transfer orbit; the second firing would then send the probe from the first transfer orbit to another transfer orbit. Finally, the third firing would propel Phobos-Grunt from the transfer Earth orbit toward Mars. First two firings would be conducted in accordance with a pre-programmed sequence, while the third maneuver would be commanded on the basis of the latest trajectory tracking data. Such a flight profile would extend the mission's Earth-orbiting phase, but optimize flight dynamics. A final two-maneuver scenario Later, yet again, the mission scenario reverted back to a two-firing Earth-escape maneuver, while the launch window shifted to Nov. 5-25, 2011. During these maneuvers, the spacecraft would be out of range of the Russian ground control network, KIK. An external propellant tank of the MDU unit would be dropped after the first engine firing. Until that time all operations onboard the spacecraft were designed to take place automatically, with ground control picking up flight operations in the transfer orbit. A number of contingency situations was anticipated in case of technical problems during an automated maneuvering phase of the mission:
Emergency (safe) mode During the flight in the emergency mode, the spacecraft was programmed to enter solar orientation and stabilize itself. Onboard batteries would recharge from solar panels pointed toward the Sun. Onboard power-hungry systems, including RPT111 and RDM radio systems would be switched off, however they could be activated either by the onboard computer or by direct commands from the control radio system, KRL BRK PM. The BRK PM command line remains open and works only as a receiver. It could be switched to the transmission mode by a command. During an emergency mode, the transmitter is activated for the downlinking of telemetry during a 40-minute periods, every two hours, during eight days. The launch of the Phobos-Grunt mission was ensured for five billion rubles by Russkiy Strakhovoi Tsentr (Russian Insurance Center), including 1.2 billion for the spacecraft itself, covering all contingencies until the vehicle escapes the Earth orbit following its liftoff. By the beginning of October, the launch of the Phobos-Grunt probe was expected on Nov. 8, 2011, at 20:16 GMT (Nov. 9, 00:16 Moscow Time). Entering Martian orbit The travel between Earth and Mars for a four-ton spacecraft was to last from 10 to 11.5 months. As many as three trajectory-correction maneuvers were planned: the first - within 10 days after the launch and two others - 80 and 14 days before reaching orbit of Mars. In the case of a launch in November 2011, the spacecraft would reach an orbit around Mars on Oct. 9, 2012. To enter the orbit, Phobos-Grunt will have to decelerate by around 800 meters per second, employing the engine of the MDU unit for the last time. Soon after reaching a 800 by 80,000-kilometer Martian orbit, the MDU, along with the lower segment of the transfer truss, would separate, followed by the release of the Chinese Yinghuo-1 spacecraft and then by the separation of the top segment of the transfer truss. Rendezvous with Phobos Free from all its "hitchhikers," the Phobos-Grunt "mother ship" would start spiraling down toward Phobos. The entire process of rendezvous with the Martian moon would take up to nine months and five or six orbit corrections would have to be conducted. One primary factor which dictates such an extended timeframe is communication windows between the probe and mission control. Sometimes, Phobos ends up in the shadow of Mars. In a worst-case situation, this shadow lasts for almost an hour out of the eight-hour orbit of Phobos around Mars. Therefore, the mission was orchestrated to minimize problems with communications and power supply. (282) An initial maneuver would raise the pericenter (the closest point to Mars) of the spacecraft's orbit to around 10,000 kilometers. By January 2013, the apocenter (the highest point above Mars) was expected to be lowered to around 10,000 kilometers. This would be followed by several weeks of tracking Phobos. If everything went as planned, a quasi-synchronous (matching) orbit, known by Russian abbreviation of KSO, between the spacecraft and its destination would be reached on February 9, 2013. Shortly before its landing on Phobos, the vehicle would be flying in a carefully tuned orbit some 50-100 kilometers above the moon. Onboard sensors would be constantly "watching" the moon, as it made full revolution below it, every orbit around Mars. (282) For the last 12 kilometers, the lander was expected to descend almost vertically, covering that distance in about 40 minutes. (287) Initially, the laser altimeter would be used to approach the surface. However it would become ineffective at the very low altitude. For the final leg of its journey to the surface, Phobos-Grunt would be equipped with a 13-kilogram DISD radar, providing navigational data to the flight control system. However in the weak gravitational field of Phobos, the entire lander would weigh only 400 grams. (284) For a successful landing, it would be critical to eliminate any horizontal movement, otherwise the spacecraft might overturn itself. Even relatively minor disturbances could cause problems. The touchdown itself would look more like a slow-motion docking than a familiar moon landing scenes with the descending ship balancing on the tail of a rocket exhaust. Quite the opposite, attitude control thrusters would be used to press the vehicle onto the surface. They will be fired on the signal from sensors in landing legs of the vehicle, confirming that the contact with the surface did take place. In order for the touchdown signal to be issued, a certain minimal vertical speed of the lander would be required. Precious cargo: taking soil samples Landing on Phobos was originally planned in the equatorial region on the side of the moon always facing Mars. (286) It would allow the use of scientific instruments on the Phobos lander to study Mars as well. However later, a pair of potential landing sites was chosen on the opposite side of Phobos to improve lighting conditions for the mission. Once the spacecraft landed, it first task was expected to be soil sampling. In case it landed without contact with Earth, for example behind a rock, or experienced some major failures onboard, a special emergency flight sequence was considered to command the spacecraft to automatically take samples of soil and send the return rocket away. However under the nominal flight scenario, the whole process of taking samples could last a minimum of two-three days and a maximum of one week. This critical work would be complicated by the near weightless conditions, which were practically impossible to simulate on Earth with a high degree of fidelity. "Intelligent vision" As always in geology, rocks would be the most attractive targets on Phobos. Under one mission scenario, Phobos-Grunt would transmit images of its landing site to mission control, giving project engineers an opportunity to assess the area around the spacecraft and on the basis of that analysis send commands to the spacecraft with exact coordinates for sampling. (282) However due to the almost 20-minute lag in the arrival of TV and radio-signals to Earth from Martian distances, developers evaluated the possibility of using a highly intelligent image-assessment technology, which could automatically survey the surrounding landscape and “tell” the robotic arm where to go to pick samples. A special system of "technical vision," sporting a panoramic camera and a stereo camera was developed to assist ground control in choosing the most intriguing locations for soil sampling. With a full day on Phobos lasting under eight hours, the mission would have roughly three-hour periods of “daylight” to conduct observations of the surrounding landscape. The return stage was essentially a separate spacecraft, designed to take off from the surface of Phobos and carry the capsule with soil smaples back to Earth. It would need a speed of only around 10 meters per second to leave the moon’s gravitational field. To preserve sensitive instruments on the descent stage, the return rocket would take off with the help of springs. Only when the return craft reached a safe distance of around 10 kilometers above the surface of Phobos, would its engines fire to add around 20 meters per second of additional velocity. The maneuver would send the spacecraft into an initial parking orbit around Mars, followed by another engine burn to enter an elliptical orbit. After several weeks of waiting for an appropriate window, the third maneuver would send the spacecraft toward Earth. Therefore, the entire trip from Phobos to Earth would take around 11 months. During all orbit correction maneuvers, the return stage would be spin-stabilized with the speed of 50 degrees per second. During the cruise stages of the flight, the vehicle would spin four degrees per second. On approaching Earth, the reentry capsule would separate from the return rocket and enter the Earth atmosphere. During the plunge through the atmosphere it would decelerate from 11.8 kilometers per second. In situ-science: experiments on the surface It was expected that most scientific payloads onboard Phobos-Grunt lander would be activated only after the departure of the soil return stage. Various instruments were expected to work on the surface of Phobos for one year, powered by solar arrays and without use of a nuclear power source, RTG, which could be an ultimate solution for this type of mission. A lot of eclipses caused by Phobos itself and by Mars would interrupt the exposure of the spacecraft's solar panels to the Sun. (284) As a result of a strict power diet, a simultaneous operation of all science payloads onboard the spacecraft would be impossible. Instead, a carefully timed sequence, which Russian scientists call "cyclogramme," would turn various instruments on and off one after another. (282) After providing soil samples for the return to Earth, robotic arms would have to be re-activated, this time for delivering soil to the so-called in-situ experiments. A major mass-spectrometer onboard would have 12 separate receptacles for in-situ analysis of the regolith. Return to Earth anxiety The final critical aspect of the Phobos-Grunt mission would be the reentry of its capsule with soil samples into the Earth atmosphere in August 2014. From the outset, Russian developers decided not to rely on any active landing systems, such as radio-beacons, to locate and recover the tiny vehicle. They cited the mass limitations of the capsule and the dangers of relying on electronic gear, which would have to function flawlessly after a multi-year journey to the Martian orbit and back. Instead, ground-based radar and optical observations would be the sole means of tracking the vehicle during reentry and of pinpointing the site of its touchdown. As a result, mission developers quietly chose the Sary Shagan test range in Kazakhstan as the primary landing site for the Phobos-Grunt mission. A birthplace of the Soviet anti-missile defense systems, Sary Shagan still serves as a key test base for Russian anti-missile interceptors and associated radar. After the end of the Cold War, the center retained some of the systems designed to detect high-velocity objects in the atmosphere and in near space. APPENDIX The Phobos-Grunt mission plan for the launch window in 2011:
Evolution of the Phobos-Grunt mission plan during 1996-2007:
*Preliminary plans, as proposed by the scientific community
Phobos-Grunt mission duration:
Page author: Anatoly Zak; Last update: December 6, 2011 Page editor: Alain Chabot; Last edit: March 7, 2011 All rights reserved |
PICTURE GALLERY
An artist rendering of the Phobos-Grunt spacecraft stranded in the low Earth orbit. Copyright © 2011 Anatoly Zak
Artist rendering of the Phobos-Grunt spacecraft descending toward the surface of Martian moon Phobos. Copyright © 2011 Anatoly Zak
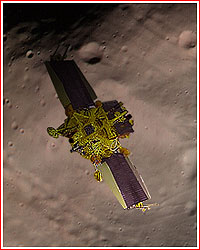
A top view of the scale model of the Phobos-Grunt spacecraft unveiled in June 2009. Click to enlarge. Copyright © 2009 Anatoly Zak
A scale model of the final architecture of the Phobos-Grunt spacecraft. Click to enlarge. Copyright © 2009 Anatoly Zak
Special upward facing thrusters would be used to "press" Phobos-Grunt spacecraft onto the surface of Phobos during landing under low-gravity conditions of Martian moon. Click to enlarge. Copyright © 2010 Anatoly Zak
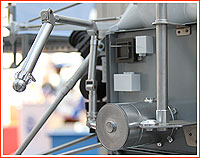
A remote manipulator developed at NPO Lavochkin would be one of two primary methods of sampling soil on Phobos. A soil receptacle and the "pneumatic mail" system designed to deliver the samples into the return capsule can be seen on the right. Click to enlarge. Copyright © 2010 Anatoly Zak
Click to enlarge. Copyright © 2010 Anatoly Zak
A pneumatic "mail system" would carry the soil from a receptacle at the bottom of the spacecraft to the return capsule. Shortly before liftoff from Phobos, a combination of pyrotechnics and springs would be used to severe and rotate a segment of the mail system tubing 90 degrees upward (top photo) to clear the way for the return rocket. Click to enlarge. Copyright © 2010 Anatoly Zak
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||